エアーバリコン、真空バリコンのサーボ化は、すでに完成し、唯一「バリ_エル」が残っていた。手元にあるバリエルのコイルの巻き数を数えてみると26ターンだ。位置検出に使うヘリカルポテンッションメータ(可変抵抗)の回転数は、10回転であることから、実用可変範囲を25回転とすると計算が簡単になる。
この場合、既に実用化した真空バリコンのサーボ化と同じで、バリコンがコイルに代わっただけ。
多回転比を実現するには、ラダーチェーンを使えば、実用範囲内での誤差となるものと考え、手持ちのスプロケットを探した。
市販アンテナカプラへのリモートコントロール用付加装置の試作のページで使った歯数30枚のスプロケットがあることを思い出した。
http://www.maroon.dti.ne.jp/~ja2eib/4chsavo/3CHsavo.html
試作して、実用化できることを確かめて、いつかと想いつつお蔵入りにしていたが、歯数30枚のスプロケットを外してきた。実用可変範囲を25回転とするとの計算から相手のスプロケットの歯数は、回転比がバリエル=25回転 VR=10回転から 30÷2.5=12枚となる。
この為にオークションで昔懐かしいTS-520の同調機構に使われていたスプロケットとラダーチェーンを落札してあった物が偶然歯数12枚だった。
ばっちりだ!!!
早速、各パーツの寸法を測り、加工を行った。
サーボ回路基板は、以前に勢いの乗じて10台ほど作ってあるのでこれ等を材木板の上に組み立てた。

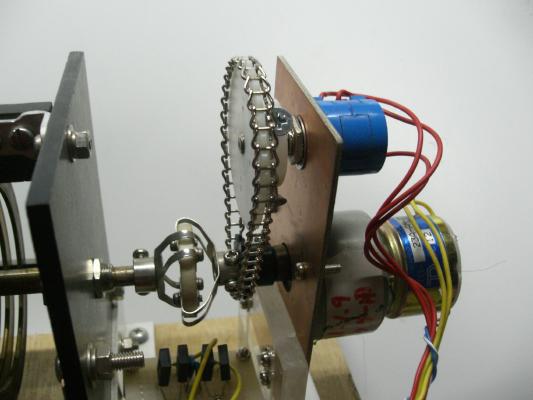
全体の姿 駆動部
組み立てる際には、バリエルの摺動子を中央付近に置き、VRも中央付近にしてから 回転方向を確かめてモーターへのリードの接続、VRへの接続を行う。制御側のVRとバリエル側のVRの回転方向を逆にするとバランスする点は一ヶ所あるが、次の位置に回転させるべく制御VRを回すとバランス点に向かってモーターは回転を開始するが、バランス点に到達することは出来ないのでバリエルの回転範囲を超えて回転することになり、どちらかが壊れる。
また、バリエルの必要な回転数は、25回転なので仮にモーターの回転数を100rpmとすると最大から最少迄15秒となるのでそれなりの回転数のモータを採用する必要がある。採用しているサーボ回路は、モータ駆動部分を考えるとDCモータ駆動用ICのフルブリッジドライバに似ていいて、半導体の動作電圧分だけ利用できる電圧が小さくなる。従って、モータの駆動電圧は、この事を考慮し、電源電圧より低い電圧の物を採用した方がよい。
ちなみに、実験に使ったモータは、定格12V仕様だが古い製品なのでメーカーのカタログを調べても記載されていない。電源電圧12vでストップウォッチ片手に実測してみると最大から最少迄1分50秒ほど要した。使えない事は、無いがもう少し早い方が良いと思う。使っているICの定格は、正負18Vなので24V位の電源を用意してやってみた。電源電圧24Vでは、40秒程で25回転したが実際に使うとなれば、最大から最少までを使う事は無いので実用上問題ないだろう。
(参考:モーターは、TSUKASA工業製の「DC12V TG-23A-A-250-KA」で10年以上前に入手。)
このサーボ機構の話の中で「ステッピングモーターを使う」話が、よく出て来る。ステッピングモーターは、駆動するパルスを発生させなければならない事に気付いて居ない場合がほとんどで、位置検出した信号をパルスに変え無ければならない事が全く忘れられている。電位差が、多きれば駆動周波数を上げ、小さければ発生パルス数を下げる工夫も必要になり、かなり面倒くさくなる。
位置検出と駆動回路と伝達機構が、一体となってサーボ機構を構成し、モータを駆動している。これ等をまとめてサーボモーターと称しているのでなかなか解かりづらい。サーボモーターという言葉自体は、DCモータ、ACモータ、ステッピングモータ、油圧モーターなどの特定な形式のモータを指すのでは無く、あくまでサーボ機構に使われるモーターのことをサーボモーターと呼ぶ。
ラダーチェーンを使うのは、この機構にはかなりの隙間が許容され、部品の位置決めを目視で行っても大丈夫だ。また、回転が、大きなズレを生じないことから採用している。単なる平ベルトを使うとこのように回転比が大きくなると小径のプーリー側に滑りを生じ易い。シンクロベルトの手もあるが、ベルトの全周に合わせ、それなりの軸間距離を加工しなければならない。ラダーチェーン方式ならば、コマ数の調整で実用範囲にできる。
何せ、ホームセンターで売っているボール盤と手ヤスリでの加工なので適当な精度としか言えない加工精度しか出せない。 しっかりと製作図面を描いて、それなりの工作機械があれば、「買う人が有るか?、無いか?は、横に置いて、商品として文句あるか?」と言える物を作る自信はある。
これで「できる」との発想で予定通り動作し、それなりに実用できる事を確かめた工作。
試作 タンク回路バリコンのサーボ化の戻る
http://www.maroon.dti.ne.jp/~ja2eib/servo2_HP/servo2.html