丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂帋嶌丂僞儞僋夞楬僶儕僐儞偺僒乕儃壔
丂2021.04.08
丂偦傟側傝偺僷儚乕傪埖偊傞巇條偺僄傾乕僶儕僐儞丄恀嬻僶儕僐儞丄僶儕僄儖偺僒乕儃壔偺帋嶌傪廔偊偨丅
丂2022.03.03丂捛婰
丂丂偙偺僶儕僄儖偲恀嬻僶儕僐儞傪嬱摦偟偰偄傞儔僟乕僠僃乕儞偲僗僾儘働僢僩偼丄巆擮偩偑儊乕僇乕偺惗嶻拞巭偱傕偆庤偵擖傜側偄
丂丂儔僟乕僠僃乕儞偼丄侾侽倣姫偒側傜偽丄巗斕偝傟偰偄傞傜偟偄丠.帟幵傪巊偭偰夞揮挷惍傪専摙偡傞偟偐柍偄條偱偡
丂丂僄傾乕僶儕僐儞偺侾俉侽搙夞揮側傜僾乕儕乕偱弌棃傑偡偑丄懡夞揮偺応崌偱偡
嶲徠丗 https://www.kggear.co.jp/news/%e3%80%8c%e3%83%a9%e3%83%80%e3%83%bc%e3%83%81%e3%82%a7%e3%83%bc%e3%83%b3%e7%94%a8%e3%82%b9%e3%83%97%e3%83%ad%e3%82%b1%e3%83%83%e3%83%88%e3%81%ae%e7%94%9f%e7%94%a3%e4%b8%ad%e6%ad%a2%e3%80%8d%e3%81%ae/
丂2025.08.03
丂丂丂僒乕儃婡峔偺徻嵶偺椺丂丂乮儘乕僇儖嬊偐傜偺儕僋僄僗僩偵傛傝廳暋偡傞偑丄捛婰乯
丂
丂丂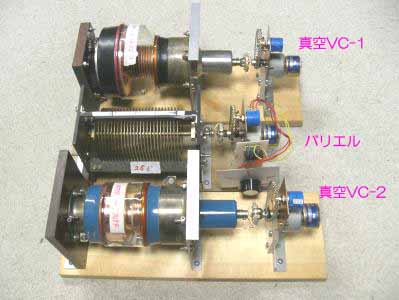 丂丂丂
丂丂丂
丂丂丂壖慻傒棫偰偺斅偺挿偝偼丄係侽僙儞僠丅丂儌乕僞偺巇條偐傜俀係倁揹尮傪巊偊偽丄夣揔偵摦嶌偡傞丅
丂丂儌乕僞偼丄庤帩偪偺乽僣僇僒揹岺惢偺DC-12V丂23A-AM-250-KA乿傪巊偭偨丅偙偺儌乕僞偺尰峴婡庬偼丄晄柧偩偭偨丅
丂丂丂偨偩丄乽DC-12V丂23A-AM-250-KA乿婰弎偐傜乽亅250亅乿偼丄僊儎乕偺尭懍斾亖侾丗250傪昞偟偰偄傞傜偟偄丠丅
丂丂丂夞揮幚尡寢壥丂俁戜偲傕偵忋婰偺摨偠僊儎乕僪儌乕僞傪慻傒崬傫偱偄傞
丂丂丂丂丂恀嬻VC乕俀 丂丂JENNINGS丂丂丂丂俀俆夞揮丂侾俀倴亖侾暘係俉昩丂侾俋倴亖俆俆昩
丂丂丂丂丂拞墰僶儕僄儖 丂儊乕僇乕晄柧丂丂丂俀侽夞揮丂侾俀倴亖侾暘俀係昩丂侾俋倴亖係侽昩
丂丂丂丂丂恀嬻VC乕侾 丂丂儊乕僇乕晄柧丂丂丂俀俆夞揮丂侾俀倴亖侾暘俁侽昩丂侾俋倴亖俆俁昩
丂丂偙偺夞揮懍搙偺昡壙偼丄偦傟偧傟偺姶妎側偺偩偑丄俁侽昩埵偱嵟彮偐傜嵟戝枠壜曄偡傟偽椙偄偐側丠偲峫偊偰偄傞丅懍搙偑丄憗偗傟偽娤偊側偐偭偨栤戣傕尰傟偰偔傞偐傜拲堄偑昁梫偩両
丂丂偳偪傜偐偲尵偆偲揹埑偺掅偄巇條偺惢昳傪巊偄丄揹尮揹埑傪崅偔庢偭偰巊偆曽偑巊偄堈偄偐傕丠丅巊梡昿搙傪峫偊傞偲丄忢帪夞揮偡傞傢偗偱偼柍偄偟丄夞楬偐傜尒傟偽揹尮懁偵偼僩儔儞僕僗僞偑俀屄捈楍偵憓擖偝傟偰偄傞宍偵側偭偰偄傞丅傑偨丄僗僀僢僠儞僌摦嶌偱偼側偄偺偱儌乕僞傊偺揹埑偼丄嵟戝帪偱傕揹尮揹埑偐傜乮Vce亊俀儃儖僩乯暘掅偄偲峫偊傜傟傞偐傜丄尷搙偼偁傞偑崅偄揹埑偺揹尮偺曽偑夞揮懍搙傪忋偘傜傟傞丅夞揮懍搙傪壓偘傞偵偼丄揹埑傪壓偘傟偽傛偄丅
丂夞揮悢俁侽夞揮偺恀嬻僶儕僐儞偺応崌丄儌乕僞乕夞揮懍搙傪壖偵俁侽倰倫倣偲偡傞偲丄嵟彮偐傜嵟戝傑偱偵侾暘傪梫偡傞偙偲偵側傞丅柍慄婡偺挷惍偺応崌丄偙傟偼偡偙偟帪娫偑妡偐傝偡偓傞偲巚偆丅強梫帪娫偼丄恀嬻僶儕僐儞偺夞揮悢偐傜儌乕僞偺夞揮悢傪妱傝弌偡昁梫偑偁傞丅偨偩丄夞傞偩偗偱偼柍偔丄昁梫側僩儖僋傕峫椂偟側偗傟偽側傜側偄丅
丂恀嬻僶儕僐儞偲僶儕僄儖乮儘乕僞儕乕僀儞僟僋僞乕乯偺俀偮偼丄慡偔摨偠峫偊曽偱惢嶌偱偒傞偺偱恀嬻僶儕僐儞偱偺峫嶡丅
丂恀嬻僶儕僐儞偼丄懡夞揮傪梫偟偰嵟彮偐傜嵟戝枠曄壔偡傞丅僐儞僩儘乕儖懁偺VR偺夞揮妏搙偼丄傎偲傫偳偺惢昳偑夞揮妏俁侽侽搙側偺偱丄偙傟偵崌傢偣偰夞揮斾傪媮傔傞帠偵側傞丅偮傑傝丄恀嬻僶儕僐儞偺夞揮悢傪俁侽夞揮偲壖掕偡傞偲
丂丂丂俁侽夞揮亖俁侽亊俁俇侽搙丂佀丂夞揮斾亖俁侽亊俁俇侽搙亐俁侽侽搙亖俁俇丂傪幚尰偟側偗傟偽側傜側偄丅
丂偙傟偱VR傪俁侽侽搙夞偣偽丄恀嬻僶儕僐儞懁偼俁侽夞揮偡傞偙偲偵側傞丅偙偺偙偲偐傜僶儕僐儞懁偺埵抲専弌偵侾侽夞揮偺僿儕億僢僩傪巊偊偽丄婡夿揑側僾乕儕乕斾偼乽侾丗俁丒俇乿偲側傝丄岺嶌傕梕堈偵側傞丅乮侾丗俁俇偺僾儕乕偱傕椙偄偑丄幚梡揑偱偼柍偄乯
丂忋婰偼丄偁偔傑偱傕寁嶼忋偱偁傝丄偦傟偧傟偺惢昳偵偁偭偨夞揮斾傪媮傔側偗傟偽側傜側偄
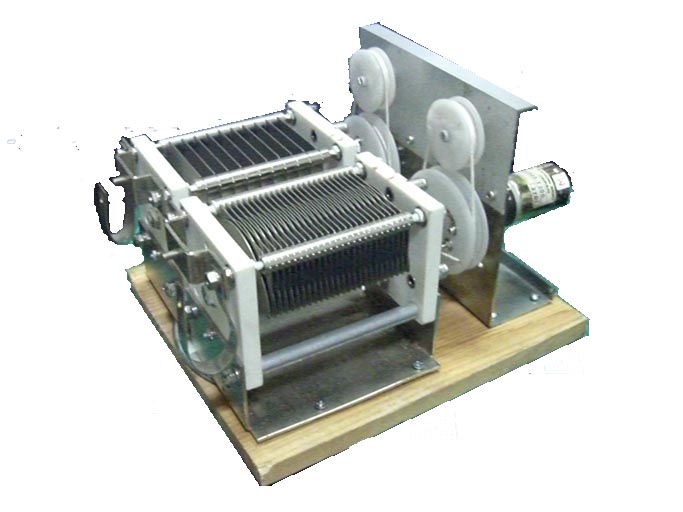
丂2020.02.11丂恀嬻僶儕僐儞偺僒乕儃壔傪捛婰丂丂丂丂2021.02.18丂僶儕僄儖偺僒乕儃壔傪姰椆
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂乮恀嬻僶儕僐儞偲摨偠婡峔側偺偱夋憸偺傒乯
丂丂丂 丂丂丂
丂丂丂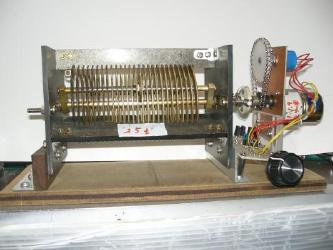
丂晛捠偺僄傾乕僶儕僐儞偺応崌
丂2019.09.28
丂丂峏偵係戜慻傒棫偰偨偺偱壛岺曽朄傪夵椙傪捛婰
丂丂
丂丂丂丂摦夋傊丂CIMG4823.mp4  丂僽儔僂僓偺乽仼栠傞乿偱栠偭偰偔偩偝偄
丂僽儔僂僓偺乽仼栠傞乿偱栠偭偰偔偩偝偄
丂儌乕僞嬱摦偺僶儕僐儞傪僕儍儞僋敔傪惍棟偟偰尒偮偗偨丅儈乕僥傿儞僌偺僆乕僋僔儑儞偱儎儊傗傫彜夛偐傜擖庤偟偨傕丅
丂朰媝偺斵曽偺懚嵼偱慡偔妎偊偰偄側偐偭偨丅偁傟両乽偙傫側偺偑丄桳偭偨偺偐丠乿偺忬懺偩偭偨
丂丂丂丂丂 丂丂丂丂丂
丂丂丂丂丂
丂崅埑彫梕検僶儕僐儞乮侾侽侽PF乯偲掅埑戝梕検僶儕僐儞乮俈俆侽PF乯偑懳偵側偭偰偄傞丅
丂梕検偐傜偡傞偲僴僀僶儞僪梡偺兾儅僢僠梡偺僶儕僐儞僙僢僩偲憐憸偝傟傞丅
丂丂偙偄偮傪僒乕儃僐儞僩儘乕儖偟傛偆偲巚偄棫偭偰偺岺嶌丅
丂変乆偱偼堦斣偺柺搢偔偝偄嬱摦晹偼丄儌乕僞幉偲僶儕僐儞幉偑捈寢偱偡偱偵弌棃偰偄傞偐傜丄惂屼婎斅偲儌乕僞幉偲埵抲惂屼偺倁俼幉傪婡夿揑偵寢崌偡傞偙偲傪岺晇偟側偔偰偼側傜側偄丅僶儕僐儞偺尰嵼偺夞揮妏傪僼傿乕僪僶僢僋偱偒傞暔側傜偽丄偄傠偄傠偲曽朄偑偁傞偩傠偆丅
丂偙偙偼丄摼堄偺巺妡偗幃偱嶌傞帠偲偟偨丅偙偺応崌丄偦偺夞揮懍搙傕掆巭妏搙偺惛搙傕偦傟側傝偱椙偔丄尒偨栚偱偦傠偭偰偄傟偽戝忎晇偩丅儌乕僞偺嵟崅夞揮懍搙偼丄揹尮揹埑偱偒傑傞偑丄俋乣侾俀儃儖僩偱廫暘
丂僒乕儃夞楬偼丄偙傟傑偱偲慡偔摨偠丅柪偆偙偲側偔幹偺栚婎斅偵夞楬傪慻傒棫偰偨丅
丂丂丂丂丂丂丂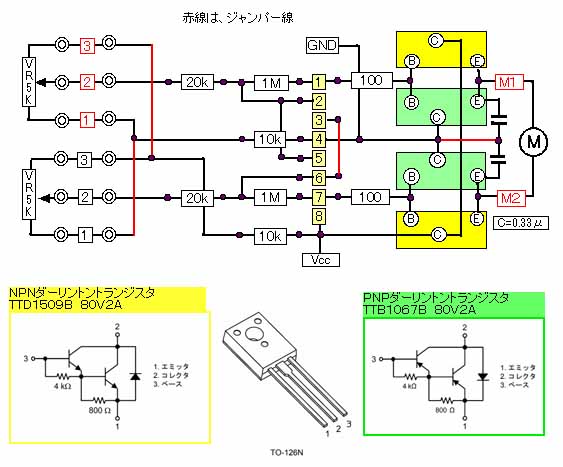
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂乮忋恾偼丄幹偺栚婎斅偺晹昳懁偐傜偺僷僞乕儞恾乯
丂丂2020.01.08丂捛婰丂丂敪怳偟偰堎忢摦嶌傪婲偙偡偙偲傪敪尒偟丄C=0.33兪傪捛壛偟偨
丂丂2020.10.10丂捛婰丂丂幙栤傪偄偨偩偄偨偺偱巊梡偟偨IC丄TR柤傪嶲峫偵
丂丂丂丂丂TR亖TTB1067B仌TTD1509B摍僟乕儕儞僩儞僐儞僾儕儊儞僞儕乕昳
丂丂丂丂丂IC亖NJM4565L摍偺係俆俆8宯俀夞楬OP傾儞僾偺SIP僷僢働乕僕昳
丂丂2020.10.16丂捛婰丂丂儌乕僞偺夞揮嬌惈偵偮偄偰
丂夞楬偺惈幙忋丄偳偪傜偺VR偑丄埵抲専弌懁丄僐儞僩儘乕儖懁偵側偭偰傕椙偄帠偵側偭偰偄傞偑丄VR偺夞揮曽岦偲儌乕僞偺夞揮曽岦偑摨偠埵憡偵側傜側偄偲僶儔儞僗揰偱夞揮偼巭傑傞偑丄堦扷僶儔儞僗偑曵傟傞偲専弌偝傟偨僘儗傪曗惓偡傞夞揮曽岦偑媡偵側偭偰偄傞偺偱丄尷奅傪墇偟偰傕夞揮偟懕偗條偲偟丄攋夡偡傞強傑偱夞揮偡傞丅
丂丂丂丂丂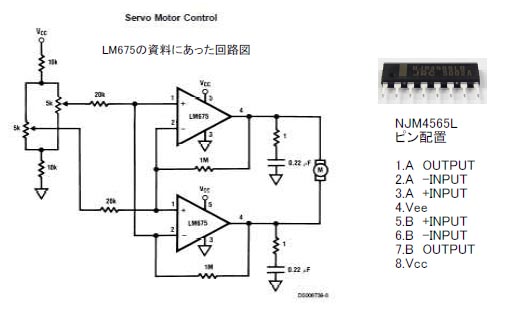 丂
丂
丂帋嶌偟偨婎斅丂丂丂
丂丂丂丂丂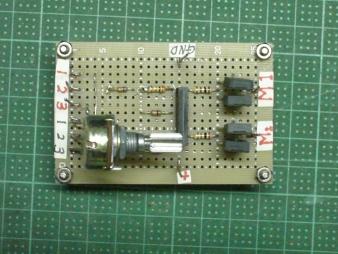
丂僩儔儞僕僗僞乕偼丄俶俹俶僟乕儕儞僩儞僩儔儞僕僗僞偺俿俿俢侾俆侽俋俛偲俹俶俹僟乕儕儞僩儞僩儔儞僕僗僞俿俿俛侾侽俇俈俛傪巊偭偨偑丄摨摍偺暔側傜戝忎晇丅偙偺僋儔僗偺俷俹傾儞僾偩偲僟乕儕儞僩儞偱側偄偲椡晄懌偵側傞丅
丂惂屼婎斅偼丄忋婰偺偛偲偔偱榁偄偨栚偲偺愴偄偲偟偐尵偊側偄丅
丂偙偺応崌丄嵟戝偺栤戣揰偼丄埵抲惂屼偺倁俼偺夞揮妏偼俁侽侽搙偱丄僶儕僐儞偺夞揮妏偼侾俉侽搙偲側傝丄俁侽侽亐侾俉侽亖侾丏俇俇俇俇偺夞揮斾偲側傞條偵夞楬側傝丄暔棟悺朄偱幚尰偟側偗傟偽側傜側偄偙偲偩
丂偙偺僾乕儕乕嶌傝傪偄傠偄傠偲巚埬偟偨偑丄偙偺斾棪傪幚尰偱偒傞婛惉昳傪棙梡偡傞偙偲偼丄扵偟偨偑側偐偭偨丅
丂丂僶儕僐儞偲VR偺夞揮妏搙偺娭學偺柾幃恾
丂丂乮侾乯僾乕儕乕捈宎斾亖侾丂摨偠捈宎偺僾乕儕乕偺応崌乮僶儕僐儞偼丄300搙夞揮偝偣傜傟傞偑丄180搙偟偐巊傢側偄乯
丂丂丂丂丂僐儞僩儘乕儖懁偵偟偭偐傝偲栚惙傜傟偰偄傞偙偲丅僶儕僐儞懁偵夞揮僗僩僢僷乕偑偁傞偲夡偟偰偟傑偆偺偱丄
丂丂丂丂丂僐儞僩儘乕儖偮傑傒偺夞揮傪侾俉侽搙埲忋夞傜側偄傛偆側婡夿揑側岺晇傪偟偨曽偑埨慡
丂丂丂丂丂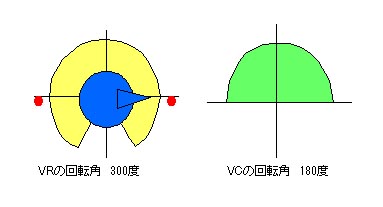
丂丂偑偨偑偨尵傢偢偵VR偺夞揮傪愒揰偱帵偡條偵侾俉侽搙偵偟偰偍偗偽丄摨偠捈宎偺僾乕儕乕偱嵪傓丅夝偐偭偰偄傞偑丄摨偠嶌傞側傜偲傗偭偰傒偨
丂丂乮俀乯 僾乕儕乕捈宎斾亖侾丒俇俇丗侾偺応崌
丂惂屼懁偺VR偑丄俁侽侽搙夞揮偡傞偲丄偙偺僾乕儕乕斾偺応崌丄僶儕僐儞偼丄俁侽侽搙亐侾丏俇俇亖侾俉侽丏俈俀搙夞揮偡傞帠傪堄枴偟丄僶儕僐儞懁偺埵抲専弌VR偼丄僶儕僐儞偺僾乕儕乕偐傜嬱摦偝傟偰偄傞丅偙傟偱偼丄僶儕僐儞懁偺埵抲専弌VR偺夞揮堟偺尷奅側傞丅埨慡傪峫偊傞偲丂俁侽侽搙亐侾丏俇俉亖侾俈俉丏俆俈搙丂懄偪丄夞揮斾亜侾丏俇俉偲偡傟偽丄埨慡堟偵廂傑傞偙偲偵側傝丄夞揮埵抲偺敾抐偼丄僶儕僐儞偺埵抲傪婎弨偵偡傞偐傜偙偆側傞丅
丂乮壛岺惛搙傪堐帩偱偒傟偽丄寁嶼抣偱傕壜擻偩乯
丂丂丂丂丂丂丂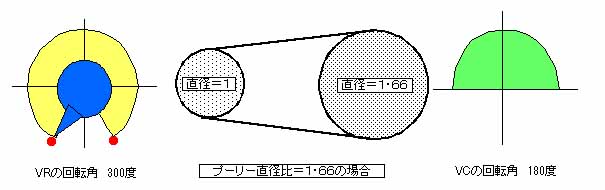
丂僄傾乕僶儕僐儞偺応崌丄丂偙偺帋嶌椺偱偼丄偡偱偵僊儎婡峔偼姰惉偝傟偰偄傞暔傪棙梡偟偰偄傞偺偱偦傟側傝偺懍偝偱夞揮偡傞丅悢昩偱侾俉侽搙夞揮偡傟偽丄廫暘偲巚偆丅廬偭偰丄擖庤偟偨僊儎乕僪儌乕僞偺夞揮悢偐傜峏偵尭懍偡傞応崌傕峫偊傜傟傞丅
丂俀偮偺僾乕儕乕傪摨偠捈宎偵偟偰丄夞楬掕悢偱偱偒側偄偐偲嵞搙幚尡傪帋傒偨丅俀偮偺倁俼偺曅懁傪彫偝偄掞峈抣偵偟丄崌寁抣偑摨偠偵側傞條偵偟偰幚尡偟偰傒偨偑丄俷俹傾儞僾偺憹暆搙傕棈傒丄偐側傝僋儕僠僇儖偵側傞偑丄乽偱偒傞乿偙偲偼敾偭偨丅乮壓恾傪嶲徠丂偙偺掞峈抣偱偼幚尰偟側偐偭偨丅夝懱偟偰偟傑偭偨偺偱丄僨乕僞柍偟乯丅傗偭傁傝丄儊僇偵擟偣偨曽偑埨慡偩丅
丂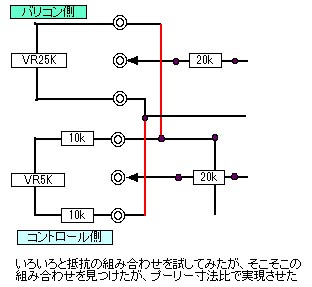 丂丂
丂丂 丂
丂
丂偨傑偨傑丄揔摉側寠偺偁傞婎斅偑丄桳偭偨偺偱偙傟傪棙梡偟偰壖偵慻傒棫偰幚尡偟偨丅
丂偙偪傜偼丄柾宆偺僾乕儕乕傪僣儅儈偵庢傝晅偗偨
丂丂丂丂丂巺妡偗梡偺僾乕儕乕偺惢嶌丅
丂偱偼丄乽帺嶌側傜丄偳偆偡傞丠乿偲峫偊偰丄岤偝俆儈儕偺傾僋儕儖斅傪娵偔嶍傝丄椉懁偵岤偝俀儈儕偺傾僋儕儖斅偱僼儔儞僕傪嶌傝丄僾乕儕乕傪惂嶌偡傞偙偲偵寛掕偟偨丅
丂偳偆偣僾乕儕乕偺帺嶌傪偡傞側傜偲丄捈宎斾侾丏俇俇俇偵側傞條偵惢嶌偟丄儂乕儉僙儞僞乕偱攧偭偰偄傞儃乕儖斦偱壛岺偡傞偙偲傪峫偊丄捈宎俆僙儞僠偲捈宎俁僙儞僠偺暔傪嶌傞偙偲偵寛傔丄岺嶌傪巒傔偨丅
丂傾僋儕儖斅偵價僯乕儖僥乕僾傪挘傝丄偙傟偵奣偹偺悺朄傪彂偄偰丄僙儞僞乕寠傪奐偗丄僕僌僜乕偱彮偟戝偒偔栚偵愗傝弌偟丄峏偵僕僗僋僌儔僀儞僟乕偱揔摉側墌偝偵側傞條偵嶍傞
丂 丂
丂 丂
丂
丂丂僕僌僜乕偱愗傝弌偡丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂僕僗僋僌儔僀儞僟乕偱揔摉側墌偝偡傞丂丂丂丂丂丂丂丂
丂
丂僙儞僞乕寠偵儃儖僩傪庢傝晅偗偰丄壛岺弨旛
丂儃乕儖斦偵僙僢僩偟丄儎僗儕偱嶍傝弌偡
丂丂 丂
丂
丂丂偙傫側嬶崌偵僙僢僩偟塃偺墴偟梿巕偱彮偟偯偮儎僗儕傪憲傝丄強掕偺悺朄枠嶍傞丅
丂偙偺憲傝婡峔柍偟偱榬椡偱憲傠偆偲偟偰傕柍棟偱僇儉傪嶌傞帠偵側傞
丂儎僗儕偺曽岦偵嶍傝偐偡偑旘傃弌偟偰偔傞偺偱杊岇偺岺晇偑昁梫偲側傞
丂斀懳懁偱嶍傟偽丄椙偄偑塃棙偒側偺偱偙偆側偭偨丅
丂丂 丂
丂
丂丂枩椡偱憲傝婡峔傪嶌傞丅塃懁偺廲斅偑儃儖僩偺夞揮検偩偗儎僗儕傪憲傝弌偡丅栜榑丅丄偙偺枩椡偼丄儃乕儖斦偺僥乕僽儖偵屌掕偡傞
丂偙傟偱墌斦偺壛岺偼丄偖傫偲妝偵側傝丄侾噊埵偺惛搙傪妋曐偱偒傞丅梡搑偐傜偟偨傜偔偳偄偑廫暘側惛搙偩丅
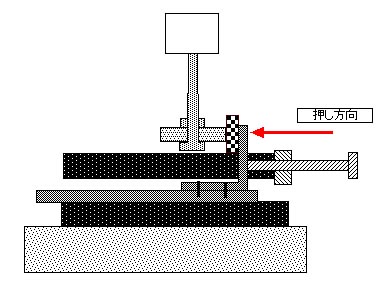
丂憲傝婡峔傪柾幃恾偱昞偡偲壓恾偺條偵側傝丄僗儔僀僟乕偑儃儖僩偱墴偟弌偝傟傞
丂丂摉慠丄僗儔僀僟乕偺暆偼丄摉慠僫僢僩偺榋妏偺暆傛傝彮偟彫偝偄
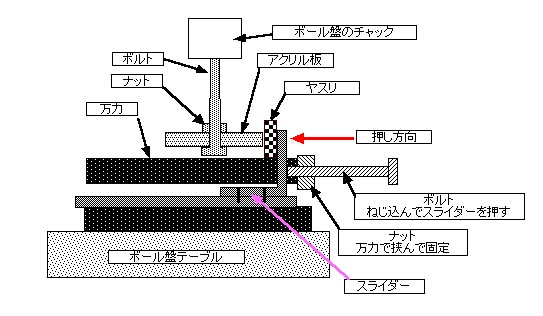
丂丂丂丂丂丂丂丂丂乮丂壛岺慜丂乯丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂乮丂壛岺姰椆丂乯
丂
丂弌棃忋偑偭偨僾乕儕乕
丂 丂
丂
丂儌乕僞乕幉梡僾乕儕乕偼丄僞僀僩惢僇僢僾儕儞僌傪棙梡偡傞
丂儌乕僞懁偺僾乕儕乕偼丄僞僀僩惢偺愨墢僇僢僾儕儞僌偺僞僀僩惢偺儕儞僌傪抲偒姺偊僾乕儕乕偲偟偨
丂 丂
丂
丂偙偆偟偰寠埵抲傪尰暔崌傢偣丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂弌棃忋偑偭偨儌乕僞幉梡偺捈宎俆僙儞僠僾乕儕乕丂丂丂丂丂丂
丂
丂捈宎俁僙儞僠偺僾乕儕乕乮倁俼幉梡乯
丂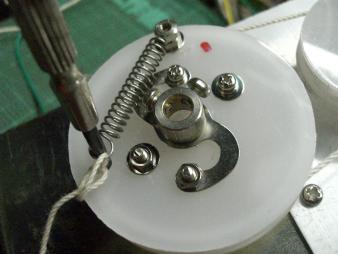 丂
丂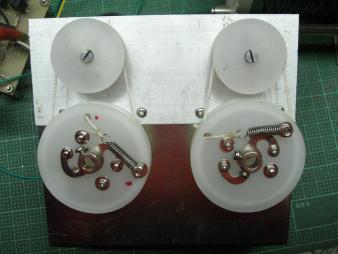 丂
丂
丂丂巺傪堷偭挘傝偽偹偵巭傔傞丂丂丂丂丂丂丂丂丂丂丂丂丂丂巺妡偗姰惉
丂 丂
丂
丂丂忋偐傜丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂屻曽偐傜丂
丂斅偵壖慻棫偟偰栤戣敪惗両
丂側偤偐丄僶儕僐儞懁偲儌乕僞懁偺僷僱儖偺崅偝偑堘偆丅嵟廔揑偵巊偆帪偵恀柺栚偵悺朄弌偟傪偡傞帠偵偟丄俠俢斅傪俀枃廳偹偱嵪偟偨
丂 丂
丂
丂偨傇傫尦偺憰抲偺斅嬥偺搒崌偩傠偆偙偺傛偆偵嬱摦晹偲崅偝偑堘偭偨丅
丂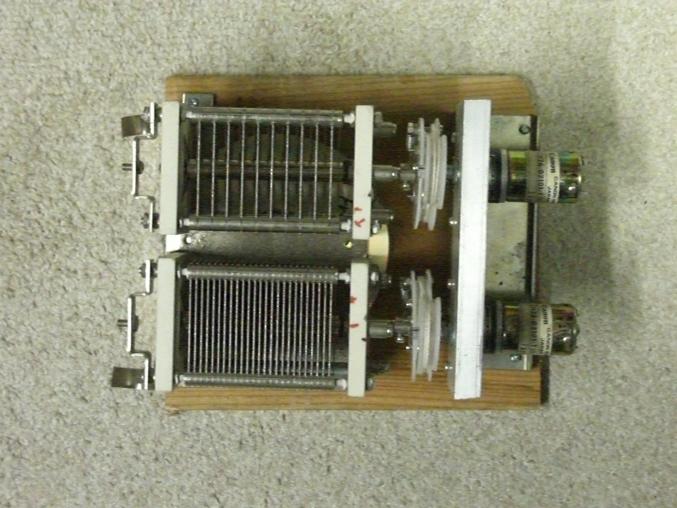
丂壖巭傔斅偵姉杇傛傠偟偔慻傒棫偰偨丅偦傟側傝偺傑偲傑傝偱姰惉偟偨丅
丂乮慺恖側傝偵夋憸張棟偱攚宨傪徚偟偰傒偨乯
丂僐儞僩儖乕儖懁偺倁俼傪夞揮偝偣傟偽丄摨偠妏搙偩偗僶儕僐儞偑夞揮偡傞
丂栜榑丄憲怣婡偵慻傒崬傔偽丄偙偺忬懺偱幚梡偵側傞丅偄偮偺擔偵丠
丂恀嬻娗丄僜働僢僩丄僐僀儖丄揹尮廃傝丂etc丂丒丒丒丒丒丒丒丒丒丂偲丂僕儍儞僋敔偁偝傝偑丄巒傑傝偦偆偩丅丅
丂丂偙傟偼丄偍撻愼傒嬊偵偍壟擖傝偟偨丅乽俆俋亄亄亄偺怣崋乿偺惪媮彂揧偊偨
丂丂丂丂丂丂丂仏仏仏丂帋嶌姰椆丂仏仏仏
2019.09.28丂捛婰
丂幹懌乮係戜暘偺惢嶌乯
丂帋嶌姰椆偲巚偄偒傗丄偦偆尵偊偽偲巚偄弌偟丄峏偵僕儍儞僋敔傪偁偝傝丄峏偵係戜傪扵偟弌偟偨丅
丂偮傑傝丄儌乕僞懁僾乕儕乕傪係屄丄VR懁僾乕儕乕傪係屄偲俉屄偺僾乕儕乕傪嶌傞偙偲偵側偭偨丅
丂丂偙偆側傞偲壛岺栬嬶偵傕偆堦岺晇傪巤偟偰丄儎僗儕傪僗儔僀僪戜偵庢傝晅偗丄傛傝梕堈偵壛岺偱偒傞岺晇傪偟丄偙傟偱偖偭偲妝偵側偭偨丅
丂丂L宆嬥嬶偺僱僕寠傪棙梡偟偰栘嵽傪僱僕巭傔偟偰丄偦偙偵儎僗儕傪敍傝偮偗傞丅
丂丂丂丂 丂
丂
丂丂僾乕儕乕壛岺慜丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂梊掕偺悺朄枠僱僕偱憲傝弌偡
丂丂丂丂 丂
丂
丂丂椺偵傛偭偰傾僋儕儖斅偵俇儈儕冇拞怱寠傪奐偗丄偙偺寠傪拞怱偵僐儞僷僗偱巇忋偘悺朄傛傝戝偒傔偺墌傪昤偒丄偙傟傪愗傝弌偡丅
丂惢恾梡偺僐儞僷僗傪巊偭偰墌傪昤偒丄偦偺拞怱埵抲偵偦傟側傝偺惛搙偱寠傪奐偗傞偺偼丄側偐側偐擄偟偄丅
峏偵丄嬱摦儌乕僞懁僾乕儕乕偼丄拞怱寠宎傪侾俇儈儕冇偵奼戝偟側偗傟偽側傜側偄丅偙偺寠宎傪侾俇儈儕冇傪偳偺傛偆偵壛岺偡傞偐丠傪峫偊偨寢壥偱偙偺傛偆偵偟偨丅岺嬶敔傪扵偟偨傜丄岾塣偵傕侾俇儈儕冇偺儂儖僜乕偑丄尒偮偐傝丄偦偺拞怱僉儕宎偼俇儈儕冇偩偭偨偺偱偙偆側偭偨丅
丂偙傟偼丄僼儔儞僕斅偺夋憸
丂丂丂 丂
丂
丂傑偢俉枃傪傑偲傔偰僨傿僗僋僌儔僀儞僟乕偱峳巇忋偘丂師偵係枃傪堦慻偵偟偰巇忋偘偵弨旛
丂丂丂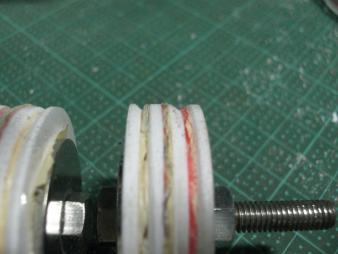
丂寗娫傪奐偗偨偺偼丄偙偺柺庢傝壛岺偺堊丄妏儎僗儕傪寉偔摉偰偰壛岺偡傞
丂儊僀儞偺僾乕儕斅偲僼儔儞僕傪挿僱僕偵傑偲傔偰丄傾僋儕儖愙拝嵻偱愙拝偡傞偺偼慜夞偲摨偠嶌嬈
丂幉巭傔偺僀儌僱僕寠壛岺丄枩椡傪強掕偺埵抲偵屌掕偟偰壛岺偡傞
丂丂丂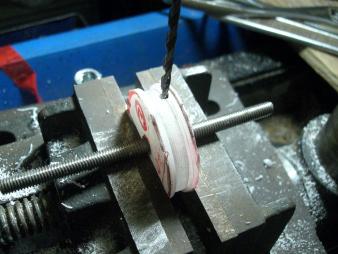 丂
丂
丂僾乕儕乕偵俇儈儕冇偺儃儖僩偵捠偟偰丄拞怱傪慱偭偰僙僢僩偡傞丅拞怱寠偐傜僉儕偑尒偊傞枠丄寠柧偗壛岺偟丄
丂僀儌僱僕偼丄係儈儕冇傪巊偆偺偱丄偪傚偭偲偒偮偄偑俁儈儕冇偺僉儕傪巊偭偨丅
丂拞怱寠偵俇噊偺儃儖僩傪捠偟偰偐傜僉儕偺埵抲寛傔傪偡傞丅乮棟桼偼丄娙扨丠乯
丂師偵丄儌乕僞懁僾乕儕乕偺拞怱寠奼戝壛岺
丂丂丂 丂
丂
丂僾乕儕乕偺壓寠偵崌傢偣偰丄枩椡偱屌掕偡傞丅丂丂丂丂備偭偔傝儂儖僜乕傪恑傔傞丅嫮偔墴偟崬傓偲壛岺擬偱梟偗傞
丂丂丂 丂
丂
丂巺傪捠偡寠壛岺丂枩椡偺峚偱屌掕偟偰拞怱傪妋曐丂丂寠壛岺偺傑傑偩偲巺偑偡傋傜側偄偺偱柺庢傝壛岺偡傞
丂丂丂 丂
丂
丂偦傟側傝偺柺庢傝壛岺丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂壓懁偵巺偑捠傞丂塃忋偼堷偭挘傝偽偹巭傔梡偺價僗寠
丂嬱摦儌乕僞僷僱儖偵VR庢傝晅偗傞捛壛僷僱儖斅偺壛岺
丂丂丂 丂
丂
丂丂摨偠庤朄偱僱僕寠壛岺偟丄儌乕僞晹暘傪俁侽儈儕冇偺儂儖僜乕偱寠壛岺
丂丂丂 丂
丂 丂
丂
丂儌乕僞嬱摦晹偺僷僱儖偵慻傒晅偗傞
丂丂丂 丂
丂
丂弌棃忋偑偭偨僾乕儕乕傪慻傒晅偗丄巺妡偗傪偡傞丅崱夞偼丄億儕僄僗僥儖偺悈巺傪嵦梡偟偨
丂丂丂 丂
丂
丂巺妡偗偺棙揰偱拞怱偼丄尒偨栚偱OK両両両
丂丂丂 丂
丂
丂斅偵壖慻棫丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂壖慻棫側偺偱惂屼VR斅偼丄埨堈偵椉柺僥乕僾巭傔
丂係戜暘偺僷乕僣傪壛岺偟偰偄傞偺偱丄巆傝俀戜傕傎偳側偔慻傒棫偰傞梊掕
丂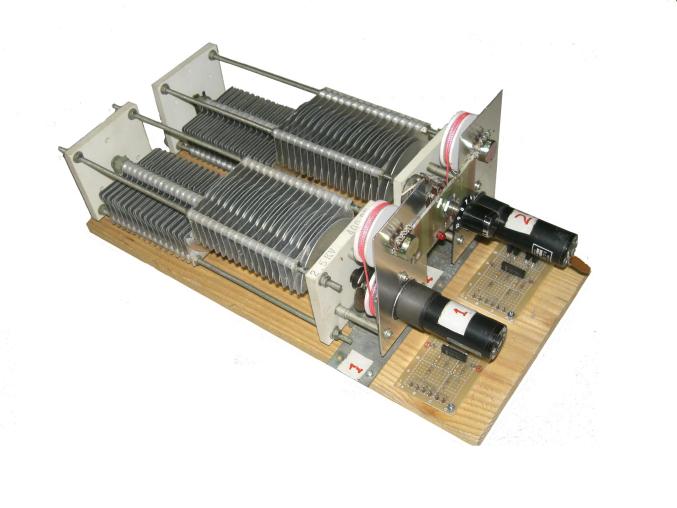 丂
丂 
丂丂丂丂丂俀楢僶儕僐儞巇條姰惉乮攝慄慜乯丂丂丂丂丂丂丂丂丂丂丂丂巆傝偺2戜傪慻傒棫偰偨乮扨撈巇條乯
丂
丂棊偲偟寠偵棊偪偨両
丂攝慄偟偰丄摦嶌妋擣傪偟偰偄偰婥偑晅偄偨丅僐儞僩儘乕儖偵巊偭偨VR偵偼乽俆K兌亊俀乿偲崗報偑偁偭偨偺偱丄偰偭偒傝俀楢VR偲怣偠偰偄偨偑丄幚偼俀廳VR偱偦傟偧傟夞揮偡傞偙偲偑敾柧偟丄僣儅儈偵岺晇偑昁梫偵側偭偰偒偨丅巇曽偑側偄偺偱摨偠庤朄偱摨宎偺僣儅儈傪俀偮嶌偭偨
丂嬼慠側偑傜丄偦傟偧傟扨撈偵惂屼偱偒傞丅
丂俀楢VR傪巊偭偰偺僶儕僐儞偺慻傒崌傢偣傪峫偊傞偲丄昞戣偺條偵俀戜傪摨婜偟偰偺俀楢僶儕僐儞丄暲楍偵愙懕偟偰俀戜偺崌寁梕検偺僶儕僐儞丄埵憡傪傪侾俉侽搙偢傜偟偰嵎摦僶儕僐儞偲偟偰偺巊偄曽偺慻傒崌傢偣偑偁傞帠偵婥偑晅偄偨丅
丂偙偺傛偆偵僒乕儃婡峔傪棙梡偡傟偽丄僶儕僐儞傪夞偡偺偵偦偺僔儍僼僩傪僷僱儖偵弌偡昁梫偑柍偔側傝丄攝抲偺帺桼搙偑偐側傝忋偑傞偺傕棙揰偵側傞丅乮墦妘憖嶌偱徹柧偝傟偰偄傞乯
丂崱夞偺僾乕儕乕惢嶌傪偟偰傒偰斀徣偟偨丅嵟弶偵僒乕儃婡峔偱乽傾儞僥僫僇僾儔偺儕儌乕僩僐儞僩儘乕儖壔乿傪峫偊偨帪丄偙偺傾僋儕儖斅偱僾乕儕乕傪嶌傞帠傪巚偄晅偄偰偄傟偽丄傾儖儈斅傪嶍傝丄巗斕偺僾乕儕乕傪慻傒晅偗偰偺暋嶨側嶌嬈傪偟側偔偰嵪傫偩偺偵偲丅
丂丂丂丂丂丂丂
丂崌寁4戜丂丂丂2.5KV400PF亊俀戜丂丂丂丂丂丂丂丂3.5KV200PF亊侾戜丂丂丂丂3.0KV200PF亊侾戜
丂晄巚媍側帠偵3.5KV200PF偲3.0KV200PF偼丄偳偆尒偰傕摨偠僒僀僘偺嬌斅偱寗娫偑堎側偭偰偄傞丅偩偐傜懴埑偑堘偆偙偲偼敾傞偑丄嬌斅偺枃悢偼摨偠枃悢側偺偵摨偠梕検偺崗報偑偝傟偰偄傞丅梕検傪幚應偟偰傒傟偽敾傞偙偲偱偳偪傜傕娫堘偭偰偄偨丅
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂JA2EIB HomePage傊