真空バリコンのサーボ化
ファイナルバリコンのサーボ化を試作後、「真空バリコンのサーボ化」ができるか?」と言われた。「出来るさ!」と即座に答えておいた。
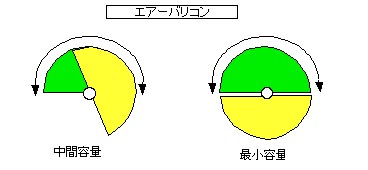
普通のエアーバリコンは、半円の極板を回転させ、極板間の面積を変化させているから、最大の可変範囲を回転角180度以上には出来ない。だから、360度以内で回転制御を考えれば良かった。だから、一般のボリューム使うと、多くが回転角300度なのでバリコン軸と「1対1」として180度分を使うか、もしくは、「1対1.6」として、300度回転を180度になるようにすれば良いことになる。
バリエルの動画へ CIMG4823.mp4 へのリンク
しかし、真空バリコンでは、容量の変化を筒状の極板を軸方向に移動させて、容量の可変する構造になっていて、10回転、20回転と軸を回転させなければならない。従って、一般的ないわゆるボリュームの回転角300度では1回転も出来ない。とんでもない回転比になるようなプーリーを作れば理屈では制作は出来る。つまり「1対10」、「1対20」の比率を実現すれば良い。しかし、この比率のプーリーは現実的ではない。
想像する真空バリコンの構造
保障は、できない。あくまでも想像したものである
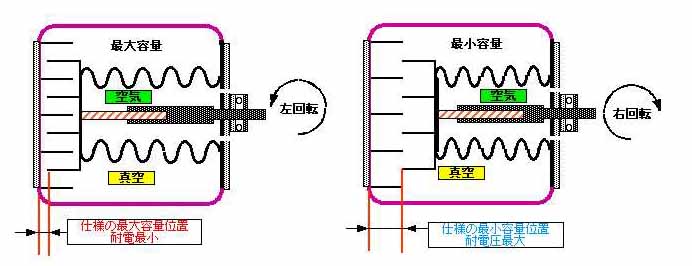
可変電極は、ベローズに固定されている。駆動軸を回転させる事に依って、前後に移動して電極間の距離が変化し、容量を可変させていると推測した。ここで注意しなければならない事は、電極間の距離は、右回転してベローズが縮みその距離は大きくなる。そして、容量は、小さくなる。反対に左回転で容量は、最大容量となる。この事が、重大な意味を持つ。
一般的なダイアル表示は、右回転で最大となり、左回転で減少する表示に成っている
従って、このサーボ機構で回転方向の指示を出す場合、ダイアルを右回転して最大値を指示する。しかし、モーターは左回転して最大値になる事を忘れてはならない
手持ちのいくつかの真空バリコンを調べていて上記を想像した。バリコンの容量の可変は、基本的に電極間の距離を機械的に変化させている。真空バリコンのガラスを通して見る限り間違いない。
となると、メーカーが仕様で謳ってる容量の可変範囲於いて、最大容量では最低耐圧を表示し、最小容量で最高耐圧を表示している。多くの真空バリコンは、仕様より大きな容量を測定できるが、だからと言って仕様容量以上の容量迄使うと耐電圧が、低くなる。
したがって、最大容量の位置を把握してこの位置を起点として使用しないと最低耐圧より低い電圧で使うことになり、スパークなどのトラブルの原因になると容易に想像できる
真空バリコンの動画へ CIMG4818.mp4 へのリンク
10回転の多回転型のボリュームのヘリカルポテンションメーターを使えば、「案ずるより産むが易し」の諺とおりで真空バリコン軸が30回転しても「1対3」のプーリーを実現すれば良いことになる。
前置きが長くなったが、試作した真空バリコンは、最大の可変範囲の回転数は13回転だった事から3回転分を使わないで10回転の可変範囲にして試作した。こうなると簡単で、手持ちのラダーチェーン用の同じ羽数のスプロケットを2枚引っ張り出してあっけなく解決した。
この真空バリコンは、何故か最大容量になると軸回転の抵抗が極端に軽くなって、ショートすると言う恐ろしい物だったこともあり、最大容量側「2回転」、最小容量側「1回転」を残してくみたてた。これは、組み立てる時に軸回転位置を充分に確かめて行う必要がある。
手持ちの真空バリコンを調べて見た結果を以下に示します。(一回転の容量変化は、ほぼ直線だった)
今回使った真空バリコン
メーカー JENNINGS 耐圧 5,000 VOLTS 型番 USLS-465-5D154(20-450PF)
|
回転数
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
11
|
12
|
13
|
|
容量PF
|
454
|
415
|
372
|
333
|
291
|
252
|
209
|
168
|
126
|
87
|
49
|
21
|
14
|
手持ち1:メーカー JENNINGS耐圧 15,000 VOLTS型番 CSX-700-15N130
(回転数から、奇数回転を記載) この場合、「プーリー比1対2.5」とする
|
回転数
|
0
|
1
|
3
|
5
|
7
|
9
|
11
|
13
|
15
|
17
|
19
|
21
|
23
|
25
|
|
容量PF
|
744
|
718
|
660
|
602
|
545
|
489
|
432
|
376
|
319
|
262
|
207
|
149
|
93
|
45
|
手持ち2:メーカー 不明 耐圧 不明 型番 不明 (50-1500PF ?実測値)
(回転数から、奇数回転を記載) この場合、「プーリー比1対2.5」とする
|
回転数
|
0
|
1
|
3
|
5
|
7
|
9
|
11
|
13
|
15
|
17
|
19
|
21
|
23
|
25
|
|
容量PF
|
1506
|
1468
|
1351
|
1302
|
1187
|
1068
|
950
|
829
|
630
|
518
|
398
|
278
|
159
|
68
|
上記のような仕様の真空バリコンのサーボ機構の試案
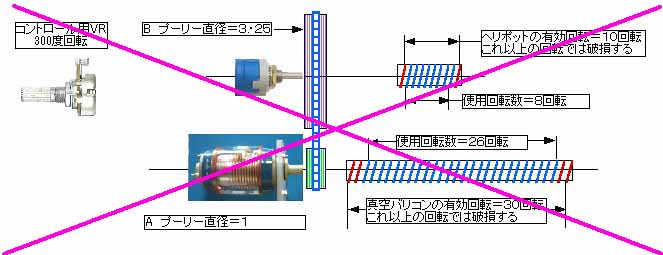
真空バリコン有効回転(最大容量⇒最小容量)=30回転 ヘリポット有効回転(最大値⇒最小値)=10回転
機械的に見れば、3対1の回転比で良いと考えられるが、これでは、両端で機械的な限界まで移動してしまって破損する恐れがある。
いや、壊れる
安全を考え、ヘリポットは、両端を1回転づつ残し、同じく真空バリコンは、各2回転を残すことにする。その回転比は、26÷8=3・25となる
計算式のみでの考察だが、下図の様に
「VRのつまみを300度回転させる」と真空バリコンの回転数=26回転、ヘリポット回転数=8回転する事。
************************* 考察不足から陥った間違い **********************************************
真空バリコンは、使用予定の可変範囲を最大容量から最小容量の間を変化することになる。
もし、真空バリコン側の両側1回転づつ残すなら、28÷8=3・5となる(破壊条件となることに気が付いて再考察した)
サーボ回路側で可変抵抗の値を調整すれば、実現可能とは思うが、以前の実験からかなりクリチカルなる事を想像する)
**************************************************************************************************
************************ 再考察して、実際に製作した状態 ****************************************
**************************************************************************************************
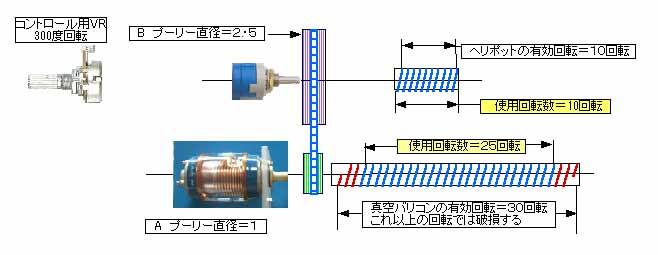
真空バリコンの最少容量から最大容量までのシャフト回転数は、30回転だった。古のTS520に採用されていた歯数12枚のラダーチェーンスプロケットを持っていたことから市販のスプロケットを探したならば、歯数30枚の物が最大だった。
手持ちの真空バリコンの容量変化から欲を言わずに25回転を使用範囲とすれば、
歯数30÷歯数12=2・5 故にヘリポット10回転だから、10回転×2・5=25回転
となり、偶然にもピッタリの計算がなり立った。
ヘリポットは、バリコンの回転軸に駆動されるので最少から最大まで回転させられる。この時、バリコン側は、まだ両端迄の回転を残して居るからストッパーで停止させられる事は無く、上図の様に安全な位置で停止する。
手持ち1:メーカー JENNINGS耐圧 15,000 VOLTS 型番 CSX-700-15N130
(回転数から、奇数回転を記載) この場合、「プーリー比1対2.5」とする
|
回転数
|
0
|
1
|
3
|
5
|
7
|
9
|
11
|
13
|
15
|
17
|
19
|
21
|
23
|
25
|
|
容量PF
|
744
|
718
|
660
|
602
|
545
|
489
|
432
|
376
|
319
|
262
|
207
|
149
|
93
|
45
|
手持ち2:メーカー 不明 耐圧 不明 型番 不明 (50-1500PF ?実測値)
(回転数から、奇数回転を記載) この場合、「プーリー比1対2.5」とする
|
回転数
|
0
|
1
|
3
|
5
|
7
|
9
|
11
|
13
|
15
|
17
|
19
|
21
|
23
|
25
|
|
容量PF
|
1506
|
1468
|
1351
|
1302
|
1187
|
1068
|
950
|
829
|
630
|
518
|
398
|
278
|
159
|
68
|
組み立て時、上記の条件を満たす機械的な位置に組み立てなければ何の意味も持たない。
くどいが、これは数式のみでの計算なので、真空バリコン回転数の限界まで使うと破壊してしまうことを忘れない事
(幸い、今回は検討の段階で気付いたので無事に試作に成功した めでたし、めでたし)
***************************************************************************************************
この試作例は、偶然、両者ともに実用回転10回転となったので「1対1」の回転比で製作することができた

試作なのでべニア板の切れ端に組み立ててみた。
真空バリコンの動画へ CIMG4818.mp4 へのリンク
ホームセンターのボール盤、手掛けのヤスリの工具からバリコン軸と駆動モータ軸の芯出しは、果てしなく困難だが、実用上問題無く使える事を確認した。当然ながら駆動部が、常に動いているならば、これでは使えない。
このようにサーボ化すれば、実際の機器に組み込む場合、コントローラを任意の場所に置く事ができるから、全体の配置の自由度が大きくなる。
2024.11.25 追記
メーカー製の位置制御機構の例
(いわゆるナット&スクリューの機構)


中央にある少し白い太い物が、ナットになっている。この画像では、中央にあるボルトが、回転して上下に移動する。そして、これが、スクリューの回転と共に上下に移動し、2つのマイクロSWを作動させて、必要以上に移動させない構造になっている。
駆動軸は、真空バリコンの駆動軸に直結されていて、当然真空バリコンの回転数と位置制御ナットの移動量は、真空バリコン軸の回転数と同期しないと意味がない。真空バリコン軸が、最大10回転であれば、この位置制御ナットも10回転分移動する。



これを使っていた製品では、駆動軸に小型のモーターが組付けて在り、このモーターを遠隔でコントロールする様になっていた。バリコン回転数(回転位置)検出の部品を組み込まれていなかったのでサーボ機構制御では無かった。14・56MHzの製品であれば、アマチュアの様にバンド切替は、必要ない!。微調整が、出来れば良いので、これで充分を考えられる。
試作 タンク回路バリコンのサーボ化に戻る
JA2EIB トップページに戻る