サーボ機構の詳細
ローカル局からのリクエストにより重複するが、追記した。
DCサーボ基本回路の例
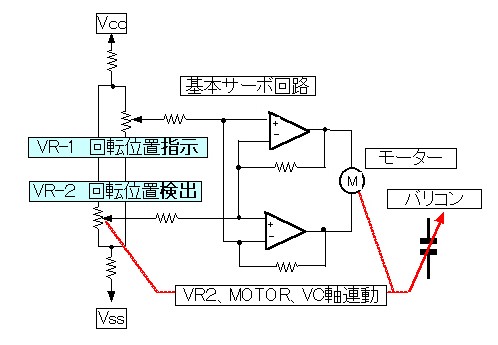

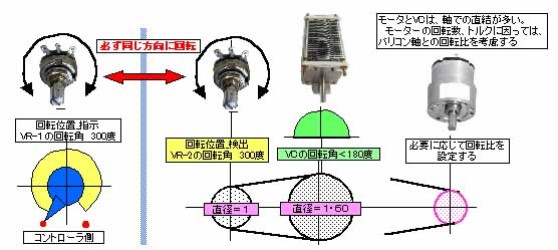
コントローラ側の VR-1 回転位置指示 を回して指示値に設定する。モータは、サーボ回路の2つのOPアンプの非反転入力の電位差が、「ゼロボルト」になる方向にモーターが回転して、モーターに連動するVR-2、バリコンも回転する。そして、VR-2 回転位置検出 の電位と等しくなり停止する。
従って、VR-1、VR-2の2つのVRの回転方向が、同じ方向に回転しなくてはならない。
もし、反対方向に回転するば、バランスする点が無いので、永久に回転を続けて、壊れる迄回転する。
組み立て時にVR-2を空転させて、回転方向をしっかり確認してから最終組み立てをしないと壊わす。サーボ回路から解る様にこのサーボ回路は、ブリッジ回路なのでバランス点で停止する。従って、手動でバランス点を見つける事は出来るけれど、それぞれのVRの回転方向が、逆になっているとバランス点は、存在しないので壊れるまで回転する。